
在工业自动化领域,PID 参数整定是闭环控制投运的核心环节,整定效果直接决定系统调节品质。从现场快速试调到精准公式计算,不同工况适配不同整定方案。本文结合图片核心内容,拆解 3 种经典 PID 参数整定方法,附完整整定步骤与参数速查表,工控人直接落地应用!
一、经验整定法:无需计算,凭运行经验快速上手
经验整定法本质是经验凑试法,无需事前计算和实验,依托现场运行经验先确定一组控制器参数,通过观察系统加干扰后的过渡过程曲线,反复试调直至获得满意控制质量,特别适用于干扰频繁、过渡过程曲线不规则的控制系统。
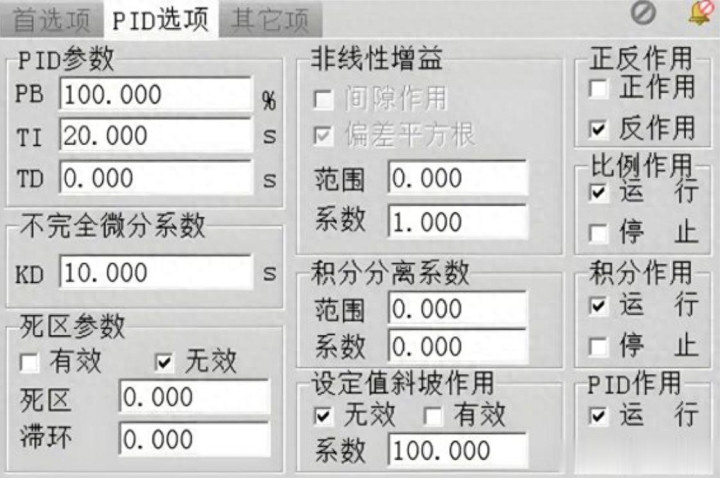
浙大中控ECS700参数面板
核心适用场景
流量、温度、压力、液位等常规被控变量的基础整定,尤其适合缺乏经验的操作人员快速完成初步参数配置。
核心整定步骤
参数初设:根据被控变量特性,参考表 1(控制器参数经验数据)确定比例度 PB、积分时间 TI、微分时间 TD 的初始值。
单比例调试:先仅用比例(P)作用,寻找合适的比例度 PB,将人工加干扰后的过渡过程调整为 4:1 的衰减振荡过程。
加入积分调节:在比例作用基础上加入积分(I)作用,先取积分时间 TI 为衰减振荡周期的一半左右;因积分作用会增加振荡,需先将比例度增大 10%~20%,调整 TI 大小直至出现 4:1 衰减振荡。
加入微分调节:最后加入微分(D)作用,从零开始逐渐加大微分时间 TD;微分作用能抑制振荡,加入前可将比例度调至比纯比例作用时更小,或缩短积分时间,试调至过渡过程时间最短、超调量最小。
备选整定路径:先根据表 1 选取 TI 和 TD(通常取 TD=(1/3~1/4) TI),再对 PB 反复试调;若曲线不符合要求,调整 TI 和 TD 后重新试调,直至满足控制要求。
关键参数速查表(表 1:控制器参数经验数据)
被控变量
PB(%)
TI(s)
TD(s)
流量
40~100
18~60
-
温度
20~60
180~600
30~180
压力
30~70
24~180
-
液位
20~80
-
-
核心优缺点
优点:操作简单、无需额外实验,适配各类控制系统;
缺点:过度依赖经验,对于缺乏经验的人员,整定花费时间较多。
二、临界比例度法:依托临界数据,公式计算精准整定
临界比例度法是在系统闭环状态下,通过纯比例控制获取临界振荡数据(临界比例度 PBₖ、临界振荡周期 Tₖ),再利用经验公式计算控制器参数,适用于能稳定出现等幅振荡的系统。
核心整定步骤
初始参数设置:将控制器积分时间设为最大值(TI=∞),微分时间设为最小值(TD=0),比例度放在较大值后,让系统投入运行。
获取临界数据:逐渐减小比例度,每改变一次 PB 值,通过改变设定值给系统加一个阶跃干扰,观察系统输出;直至过渡过程出现等幅振荡,记录此时的临界比例度 PBₖ和临界振荡周期 Tₖ。
公式计算参数:利用 PBₖ和 Tₖ,参考表 2(临界比例度法控制器参数计算表,4:1 衰减比)计算最终整定参数。
参数投运整定:将比例度换成整定后的值,依次完成积分时间、微分时间的整定。
参数计算公式表(表 2:临界比例度法控制器参数计算表,4:1 衰减比)
控制规律
比例度 PB(%)
积分时间 TI/s
微分时间 TD/s
P
2PBₖ
-
-
PI
2.2PBₖ
5Tₖ
-
PD
1.8PBₖ
-
6Tₖ
PID
1.7PBₖ
30Tₖ
7.5Tₖ
三、衰减曲线法:实测衰减数据,适配多数系统的通用方案
衰减曲线法与临界比例度法整定过程相似,核心区别是直接让系统出现 4:1 的衰减振荡,再根据实测的衰减比例度 PBₛ和衰减振荡周期 Tₛ计算参数,试振时间短、易操作,是工业现场应用最广泛的整定方法。
核心整定步骤
初始参数设置:闭环状态下,将积分时间置于最大值,微分时间置于最小值,比例时间置于较大值。
获取衰减数据:让设定值变化作为干扰输入,逐渐减小比例度 PB,观察系统输出响应曲线;当系统出现 4:1 的衰减振荡时,记录此时的比例度 PBₛ和衰减振荡周期 Tₛ。
公式计算参数:参考表 3(衰减曲线法控制器参数计算表,4:1 衰减比),代入 PBₛ和 Tₛ计算最终整定参数。
参数计算公式表(表 3:衰减曲线法控制器参数计算表,4:1 衰减比)
控制规律
比例度 PB (%)
积分时间 TI/s
微分时间 TD/s
P
PBₛ
-
-
PI
1.2PBₛ
30Tₛ
-
PID
0.8PBₛ
18Tₛ
6Tₛ
总结
无临界振荡条件、需快速上手,选经验整定法,依托参数速查表即可完成初步整定;
系统能稳定出现等幅振荡、追求公式精准度,选临界比例度法;
多数常规工业系统、追求高效易操作,选衰减曲线法,是现场应用的首选方案。
兴盛网提示:文章来自网络,不代表本站观点。


沪深京行情 实时轮播
推荐资讯